جهاز تحديد موضع اللحام عالي الدقة مزود بمحرك سيرفو

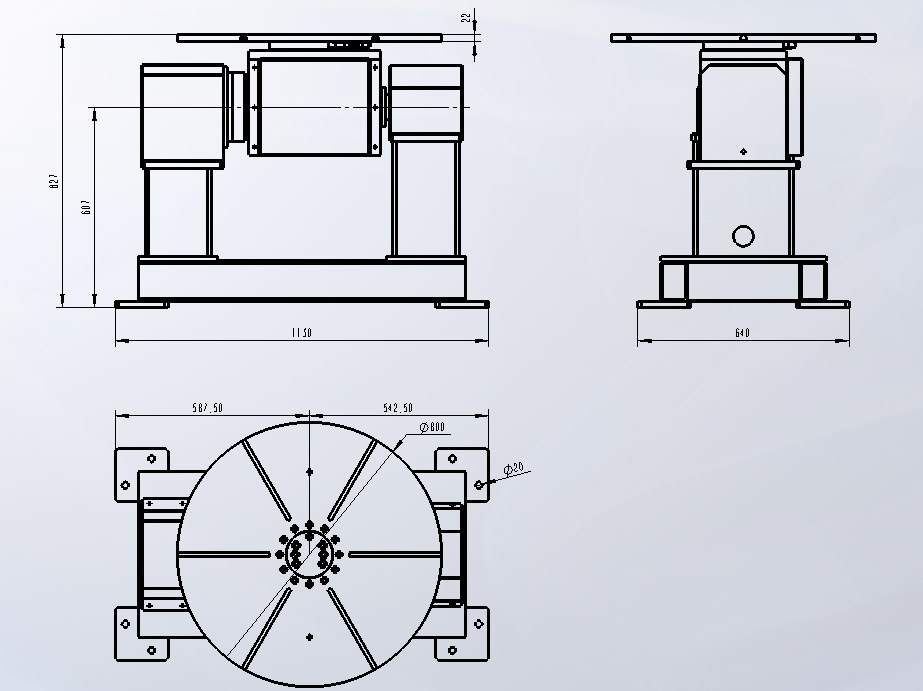
أبعاد جهاز تحديد المواقع
وصف
مُحدد موضع سيرفو ثنائي المحور
- أجهزة تحديد المواقع لأنظمة روبوتات اللحام
يمكن تدوير المحور -1 أفقيًا، ويمكن قلب المحور الآخر لأعلى ولأسفل لإجراء لحام متعدد الزوايا لقطع العمل المعقدة
- يستخدم جهاز تحديد المواقع نفس جهاز القيادة المستخدم في الروبوت، وهو متوفر بسرعة عالية ودقة عالية وحمولة عالية
- يوفر جودة لحام أعلى
- يمكن تحقيق هيكل صغير الحجم مع عزم دوران مسموح به محسّن، وقصور ذاتي، وقدرة تحمل حمولة أكبر.
يمكن تكييفه مع ماركات أخرى من الروبوتات مثل فانوك، إيه بي بي، كوكا، ياسكاوا. (يجب على العملاء تقديم رسم تخطيطي للمحرك، ثم نقوم بتحديد فتحة التركيب بناءً على الرسم التخطيطي للمحرك).
خزانة وحدة التحكم المنطقية القابلة للبرمجة (PLC) اختيارية.
قطر جهاز تحديد الموضع
| نموذج | JHY4030P-080 |
| جهد الدخل المقنن | أحادي الطور 220 فولت، 50/60 هرتز |
| فئة عزل المحرك | F |
| طاولة عمل | القطر 800 مم (قابل للتخصيص) |
| وزن | حوالي 400 كجم |
| الحمولة القصوى | الحمولة المحورية ≤300 كجم / ≤500 كجم (يمكن تخصيص الحمولة >500 كجم) |
| قابلية التكرار | ±0.1 مم |
| وضع التوقف | أي وظيفة |
العبوة: صناديق خشبية
مدة التسليم: 40 يومًا بعد استلام الدفعة المقدمة
التعليمات
1. س: هل يمكنني استخدام جهاز تحديد المواقع الخاص بك لروبوتي من نوع فانوك/إيه بي بي/كوكا/ياسكاوا؟
ج: نعم. لكن يجب عليك توفير المحرك وتركيبه بنفسك.
2. س: هل يمكن لموقعك أن يتحرك بالتزامن مع الروبوت الخاص بك؟
ج: نعم.




