روبوت لحام MIG صيني عالي الجودة للحام الفولاذ المقاوم للصدأ







جسم الروبوت
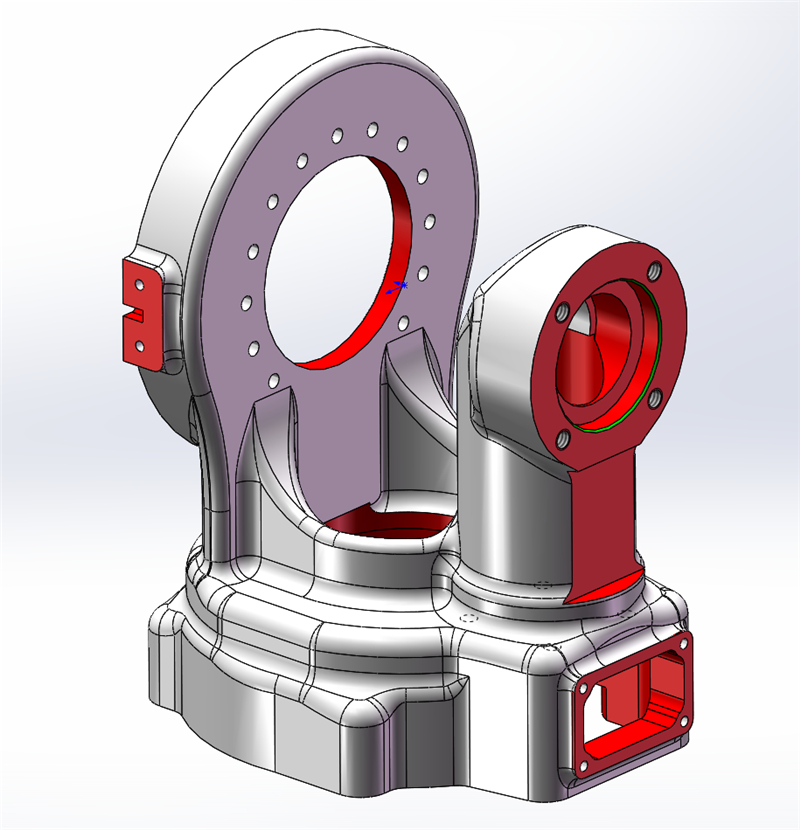
تم إجراء تغييرات رئيسية على روبوت JHY في عملية الصب بالقالب والتصميم التفصيلي للهيكل، وقد قام فريق البحث والتطوير لدينا بالعديد من الابتكارات في تصميم هيكل الروبوت، وحصل على أكثر من عشر براءات اختراع جديدة.
على سبيل المثال، تم تطوير المحور السادس بآلية نقل عالية الدقة وقضبان تقوية مصممة خصيصًا، كما أن قرص إخراج العجلة السادسة مصمم بدون تروس، مما حسّن بشكل كبير من دقة الروبوت واستقراره. حتى عند تشغيل شعلة اللحام في وضعيات صعبة، يظل الروبوت ثابتًا دون اهتزاز. وقد أكد عملاؤنا المحليون هذه الميزة.
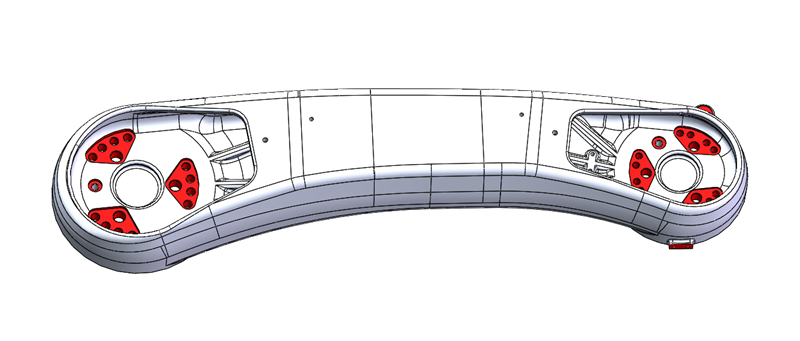
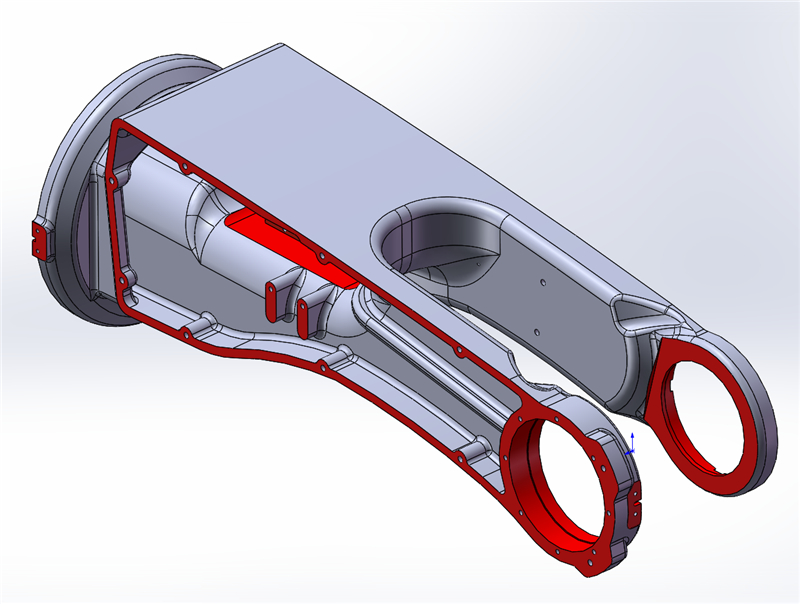
يتم تصنيع هياكل الروبوتات بتقنية الصب بالقالب، مما يجعل روبوتاتنا ذات كثافة عالية وأخف وزنًا. يمكن أن يكون الساعد أضيق وأطول، وتكون النسبة بين العضد والساعد أقرب إلى النسبة الذهبية، مما يجعل الحركة أكثر مرونة وسرعة.
التصميم العام
يتميز تصميم ذراع الروبوت المستقيم بالبساطة والأناقة، ويتناغم بشكل أكبر مع ذوق السوق الأوروبية. وقد حصل تصميم جسم الروبوت على عدد من براءات الاختراع التقنية، مما يجعله أكثر كمالاً.
أفضل ماركة أسلاك
تم تصنيع الأسلاك الداخلية والمحطات الطرفية للروبوت بواسطة أفضل العلامات التجارية اليابانية: DYEDEN و TAIYO، وهي نفس العلامات التجارية المستخدمة من قبل ABB و Fanuc.
الطرفية: ماركة ييرما الإيطالية.
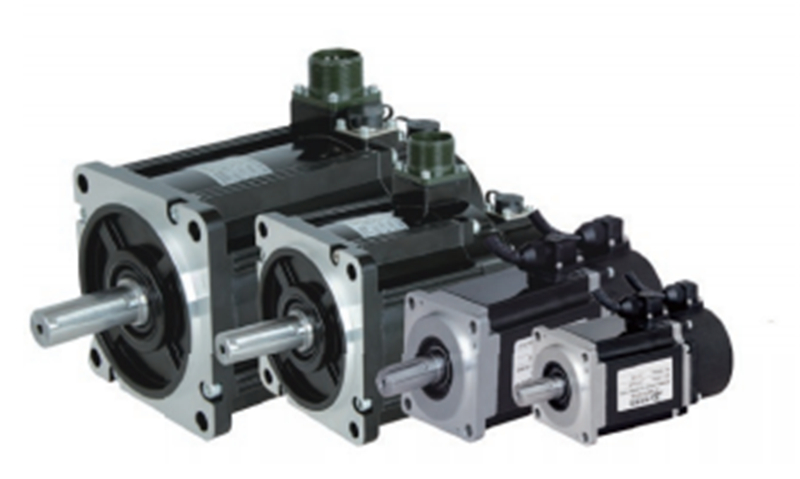
العلامات التجارية الرائدة لمحركات السيرفو / المحركات / المخفضة
جميعها تعتمد على العلامات التجارية الرائدة في الصين. وقد خضعت كل علامة تجارية لاختبارات ودراسات مطولة قبل اتخاذ القرار النهائي، وذلك لضمان ملاءمتها لاستخدام روبوتاتنا، وأن جودتها وأداءها مستقران وموثوقان.
يعتمد المحوران J1 وJ2 تصميمًا بثلاثة أعمدة لا مركزية بعزم دوران يصل إلى 65 نيوتن متر، مما يقلل من تآكل التروس ويزيد من عمر المخفض. وتُعدّ مخفضات المحورين J1 وJ3 في روبوت JHY حاليًا من أعلى التكوينات المتوفرة في الصين.
أما بالنسبة لمحرك السيرفو، فنحن نستخدم الآن محرك 3 كيلو واط كحد أقصى للروبوتات.
بالنسبة للروبوتات التي يبلغ طولها 1.8 متر و 2 متر، تكون قوة الدفع المطلوبة للمحورين الأول والثاني أكبر، كما أن متطلبات طاقة المحرك أعلى أيضًا.
تستطيع المحركات عالية الدقة ومتعددة المواصفات تلبية متطلبات التطبيقات الخاصة بروبوتنا بشكل كامل.

3 سنوات / 7500 ساعة بدون صيانة
الصيانة بسيطة، ويمكن للعملاء أنفسهم تشغيلها بسهولة.
براءات اختراع وتصاميم أخرى
تم تغيير نظام النقل الثانوي سداسي المحاور إلى نظامي نقل بالحزام، مما زاد من نسبة النقل وحلّ مشكلة الحركة السريعة وغير الدقيقة للمحور السادس. صُمم قرص إخراج المحور السادس بدون تروس، مع آلية نقل عالية الدقة، مما يُحسّن دقة حركة المحور السادس. لدينا حاليًا أكثر من 30 براءة اختراع متعلقة بروبوت اللحام.
فيديو
حدود
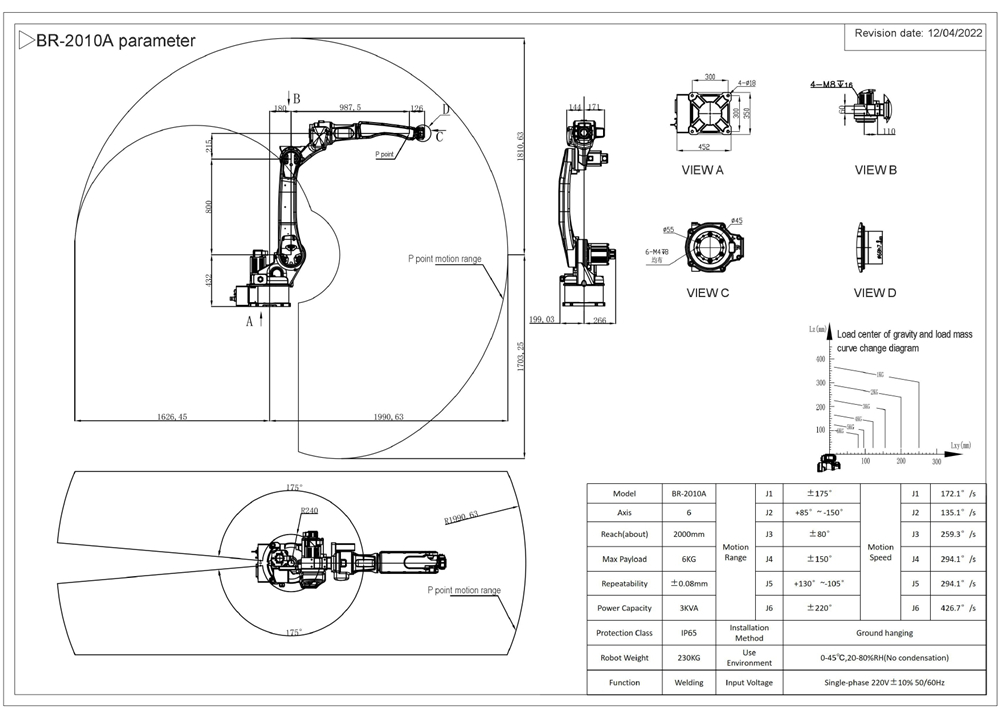
| نموذج | BR-2010A | نطاق الحركة | J1 | ±175° | سرعة الحركة | J1 | 172.1 درجة/ثانية |
| محور | 6 | J2 | +85°~ -150° | J2 | 135.1 درجة/ثانية | ||
| الوصول (حول) | 2000 مم | J3 | ±80° | J3 | 259.3 درجة/ثانية | ||
| الحمولة القصوى | 6 كجم | J4 | ±150° | J4 | 294.1 درجة/ثانية | ||
| قابلية التكرار | ±0.08 مم | J5 | +130°~-105° | J5 | 294.1 درجة/ثانية | ||
| سعة الطاقة | 3 كيلو فولت أمبير | J6 | ±220° | J6 | 426.7 درجة/ثانية | ||
| فئة الحماية | IP65 | طريقة التركيب | معلقة أرضية | ||||
| وزن الروبوت | 230 كجم | بيئة الاستخدام | 0-45 درجة مئوية، 20-80% رطوبة نسبية (بدون تكثف) | ||||
| وظيفة | اللحام | جهد الدخل | أحادي الطور 220 فولت ±10% 50/60 هرتز | ||||





